Melding LLM and temporal logic for reliable human-swarm collaboration in complex environments
Abstract
Robot swarms promise scalable assistance in complex and hazardous environments. Task planning lies at the core of human–swarm collaboration, translating the operator’s intent into coordinated swarm actions and helping determine when validation or intervention is required during execution. In long-horizon missions under dynamic scenarios, however, reliable task planning becomes difficult to maintain: emerging events and changing conditions demand continual adaptation, and sustained operator oversight imposes substantial cognitive burden. Existing LLM-based planning tools can support plan generation, yet they remain susceptible to invalid task orderings and infeasible robot actions, resulting in frequent manual adjustment. Here we introduce a neuro-symbolic framework for long-horizon human-swarm collaboration that tightly couples verifiable task planning with context-grounded LLM reasoning. We formalize mission goals and operational rules as temporal logic formulas and admissible task orderings as task automata. Conditioned on these formal constraints and live perceptual context, LLMs generate executable subtask sequences that satisfy mission rules and remain grounded in the current scene. An uncertainty-aware scheduler then assigns subtasks across the heterogeneous swarm to maximize parallelisms while remaining resilient to disruptions. An event-triggered interaction protocol further limits operator involvement to sparse, high-level confirmation and guidance. In large-scale simulations with more than 40 robots executing 41 tasks with 155 subtasks in 11-minute missions, our system improves task success rates by 26% and increases completed tasks by 132% relative to state-of-the-art baselines. At the same time, it reduces operator interventions by 77% and lowers physiological stress by 49%. Deployment on a heterogeneous robotic fleet yields similar results while remaining robust to hardware-specific actuation and communication uncertainties. Together, these results support a formal and scalable paradigm for reliable and low-overhead human–swarm collaboration in dynamic environments.
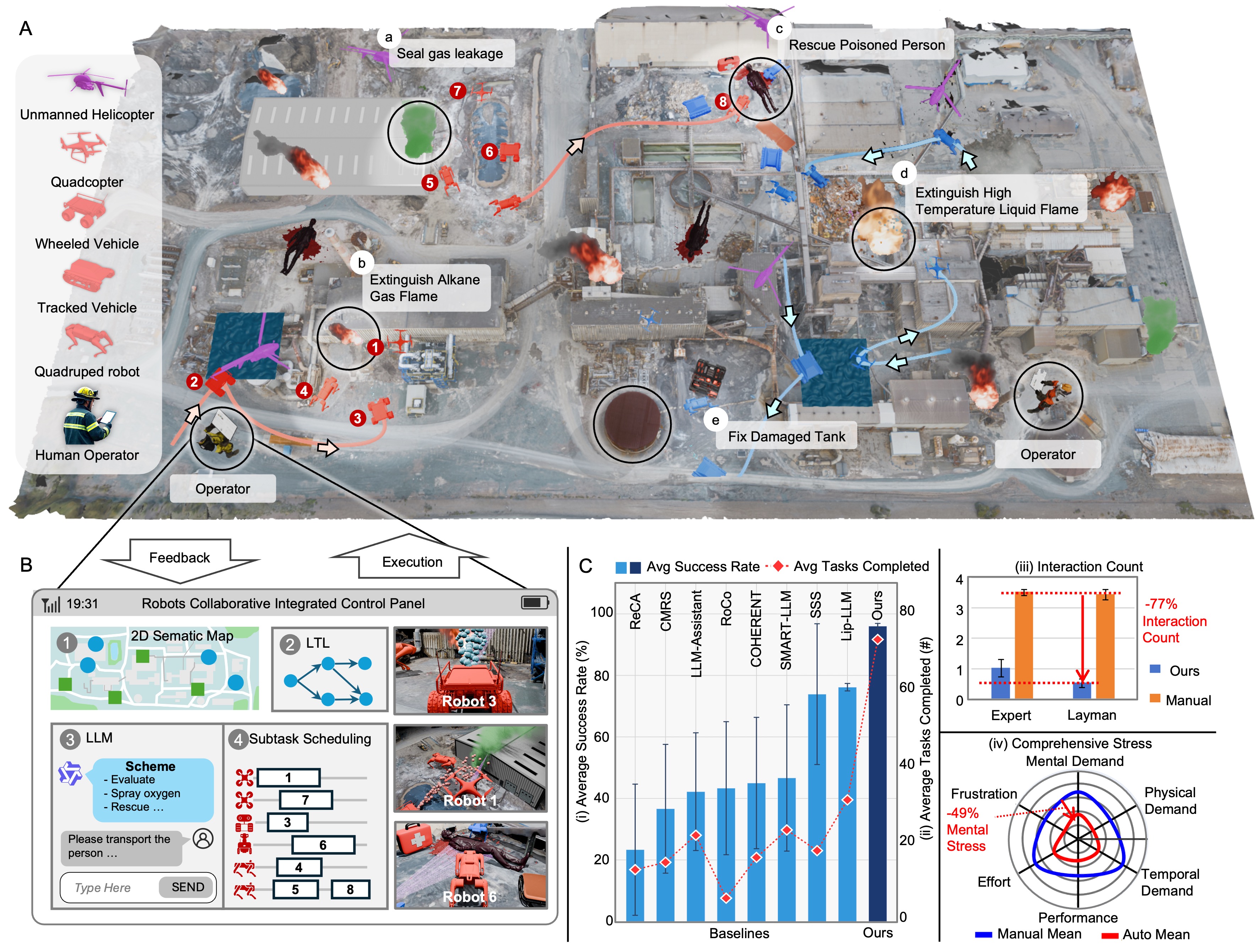
Fig. 1. An illustration of the proposed method for task planning of swarms.
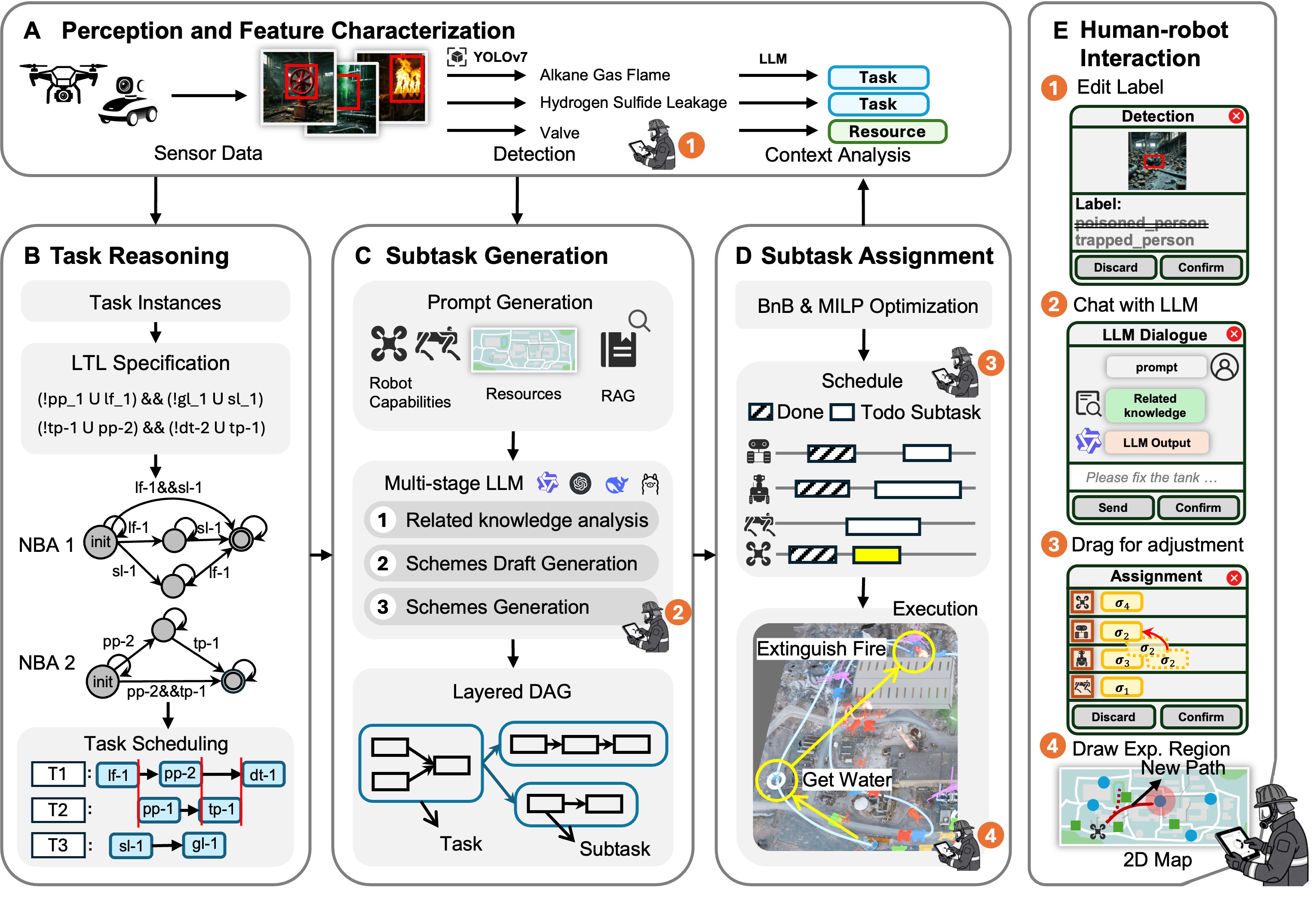
Fig. 2. Framework overview.
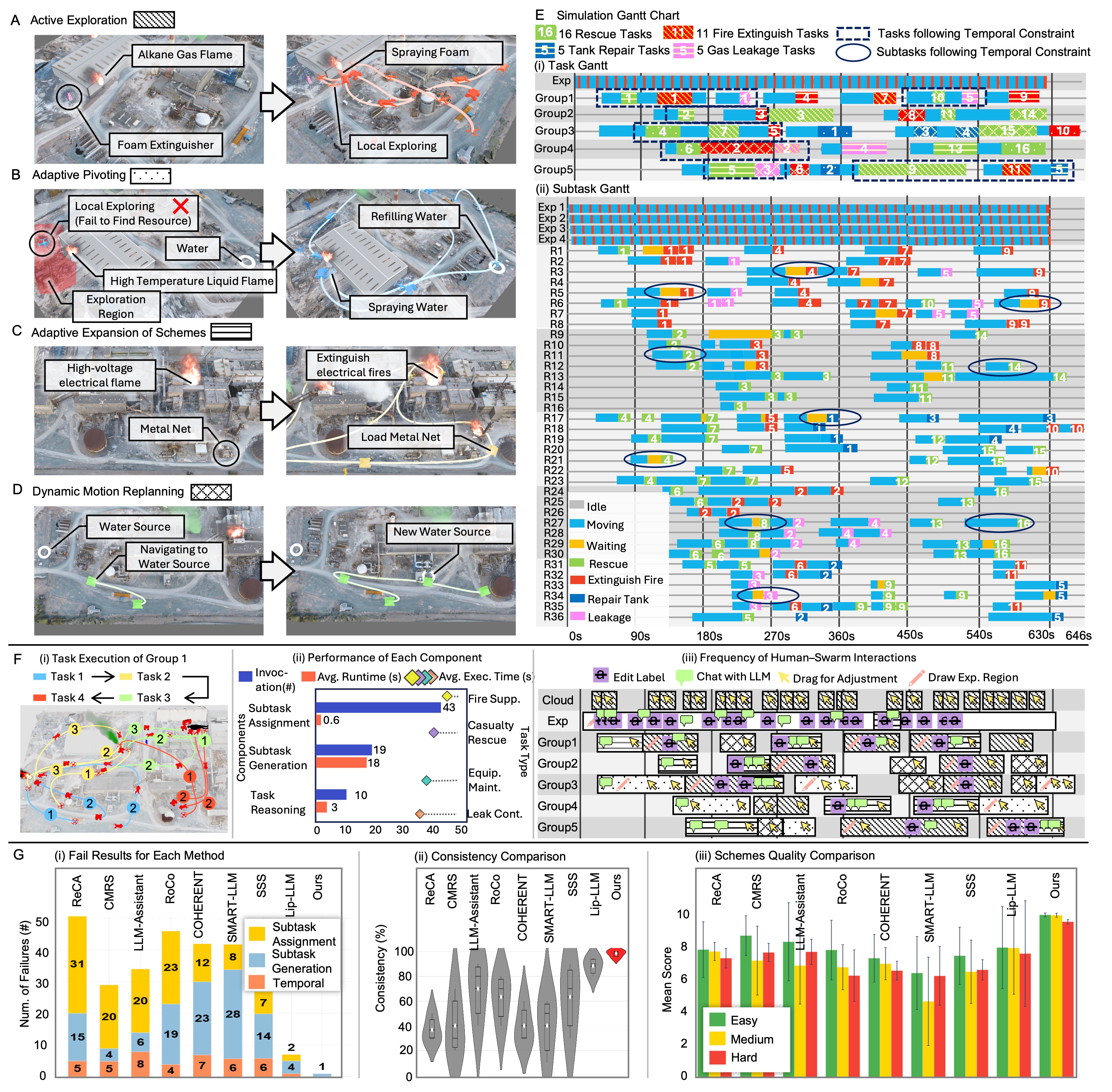
Fig. 3. Planning reliability comparison.
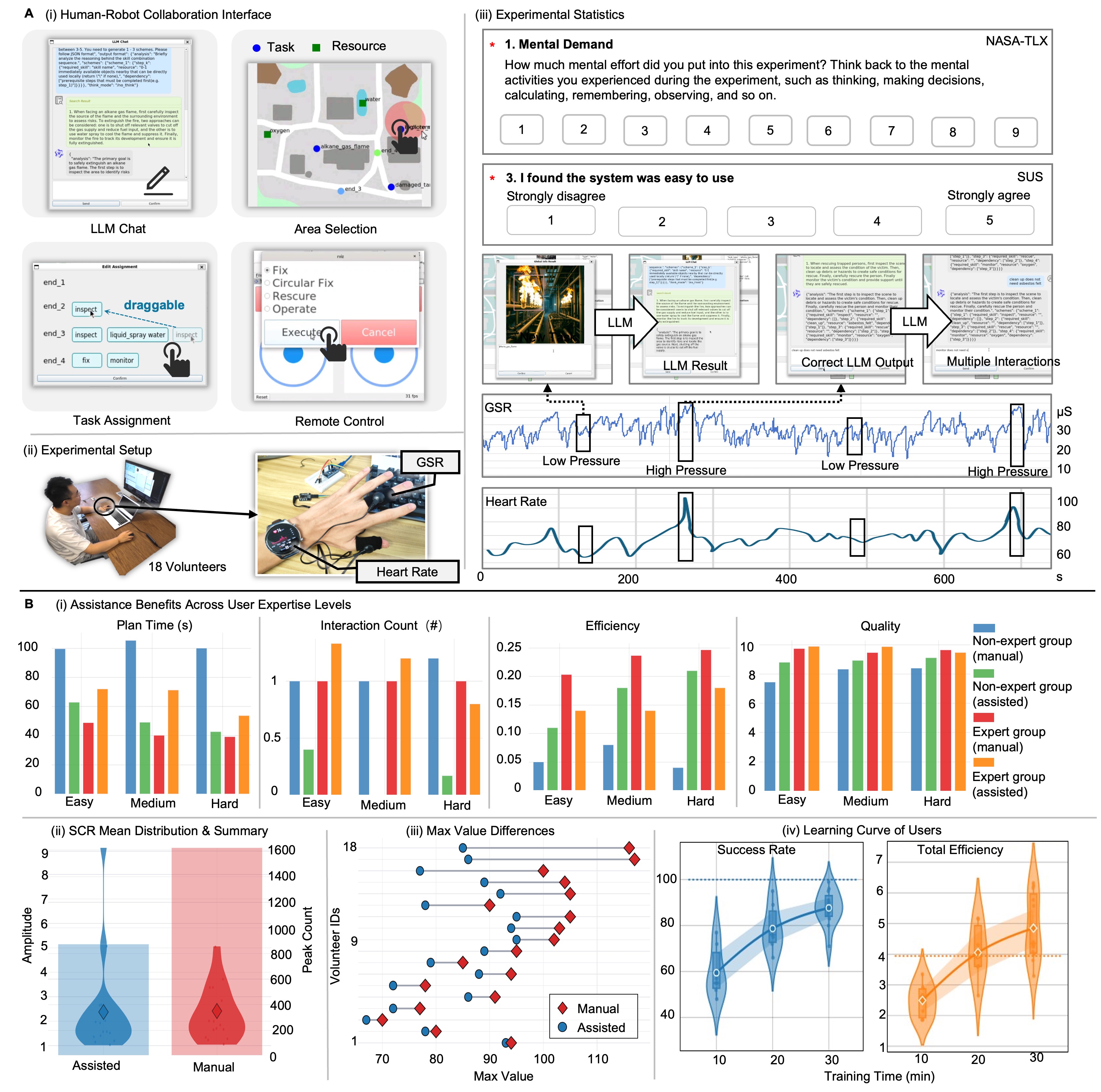
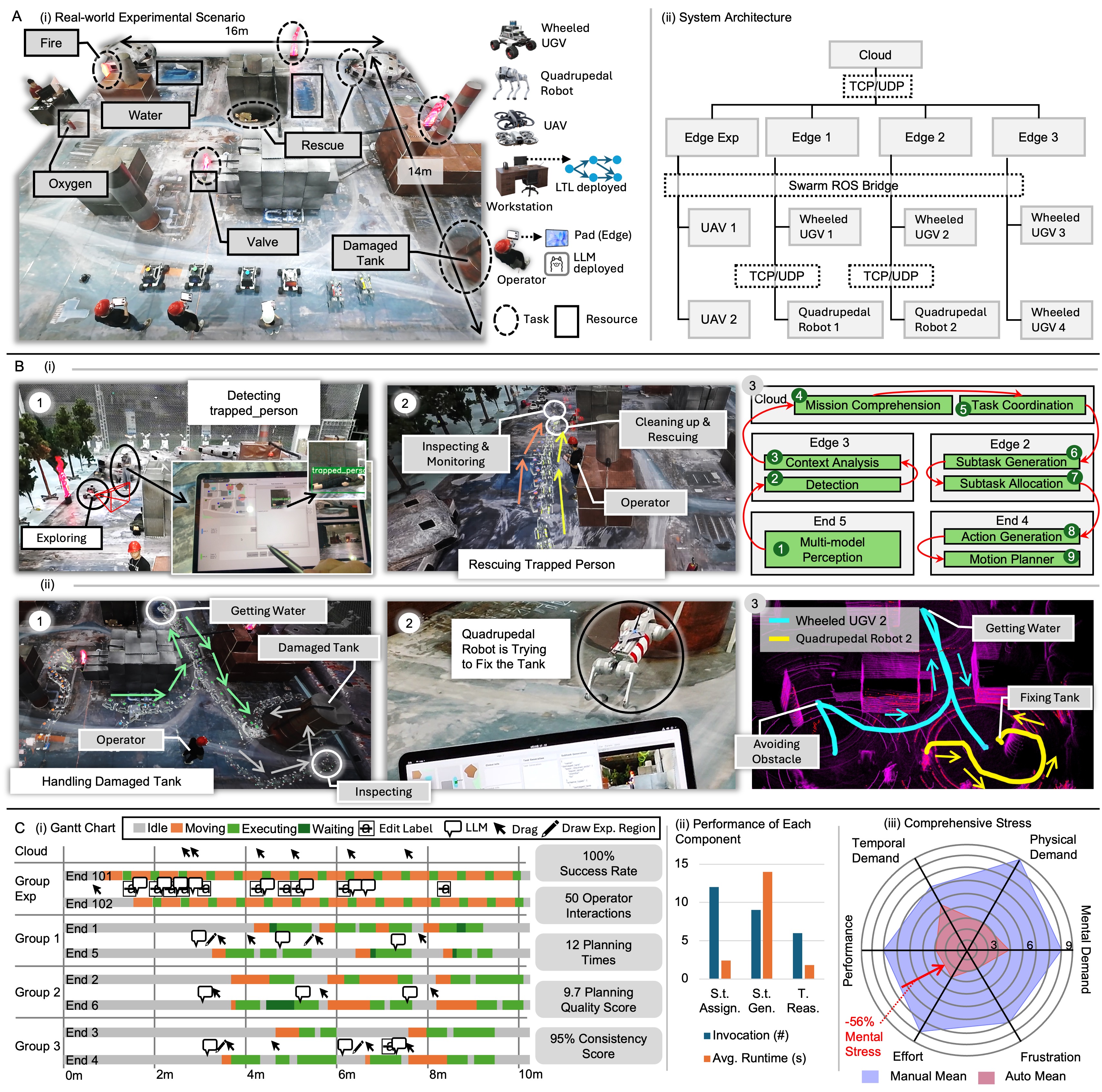
Fig. 4. Human-swarm collaboration experiment.